 EN
EN
 AR
AR CS
CS NL
NL FR
FR DE
DE IT
IT JA
JA KO
KO PL
PL PT
PT RU
RU ES
ES UK
UK TH
TH TR
TR



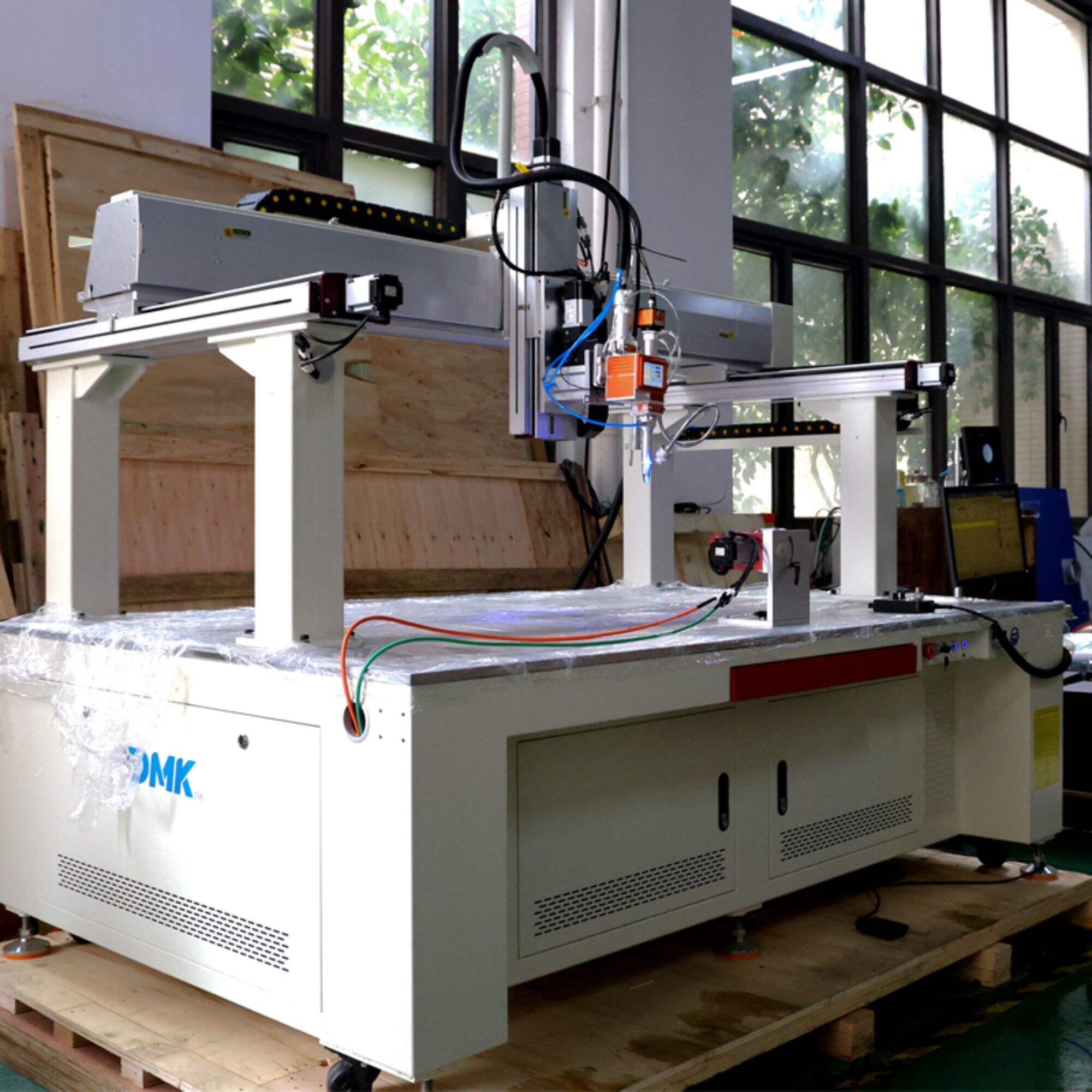




Yaskawa หุ่นยนต์ปั่นอุตสาหกรรมหกแกนสําหรับปั่นอัตโนมัติ
คำอธิบายสินค้า
การสื่อสารดิจิตอล
การสื่อสารดิจิตอลที่ใช้ระบบอีเธอร์เน็ต กับหุ่นยนต์ จะทําให้การบูรณาการได้เรียบร้อย
กระจายน้ํามากน้อย
โดยการควบคุมระยะเวลาในการผสมผสานทั้งหมดอย่างแม่นยํา จากการจุดไฟวงศ์จนถึงการสร้างน้ําตกลงและการแตกของสะพาน จะสามารถทําให้เกิดการกระจายน้ําตกลงมากน้อย โดยลดการกระจายน้ําตกลงถึง 90% เมื่อเทียบกับแหล่งพลังงานการผสมแบบด
การจุดไฟแบบกระบวนการยกกระบวนการจับ
เทคโนโลยีการจุดไฟแบบกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการกระบวนการ
การควบคุมความยาววงจรแบบคง
การควบคุมอินเวอร์เตอร์ดิจิตอลความเร็วสูง ปรับวงจรและความแรงดันอย่างรวดเร็ว เพื่อให้การปั่นคงในช่วงความแรงดันที่กว้าง
การใช้งานง่าย
ด้วยการปรับแบบแตะเดียว รูปแบบวงโค้กสามารถปรับแต่งได้อย่างอิสระ ทําให้มันง่ายที่จะตอบสนองความต้องการการปั่นที่แตกต่างกัน
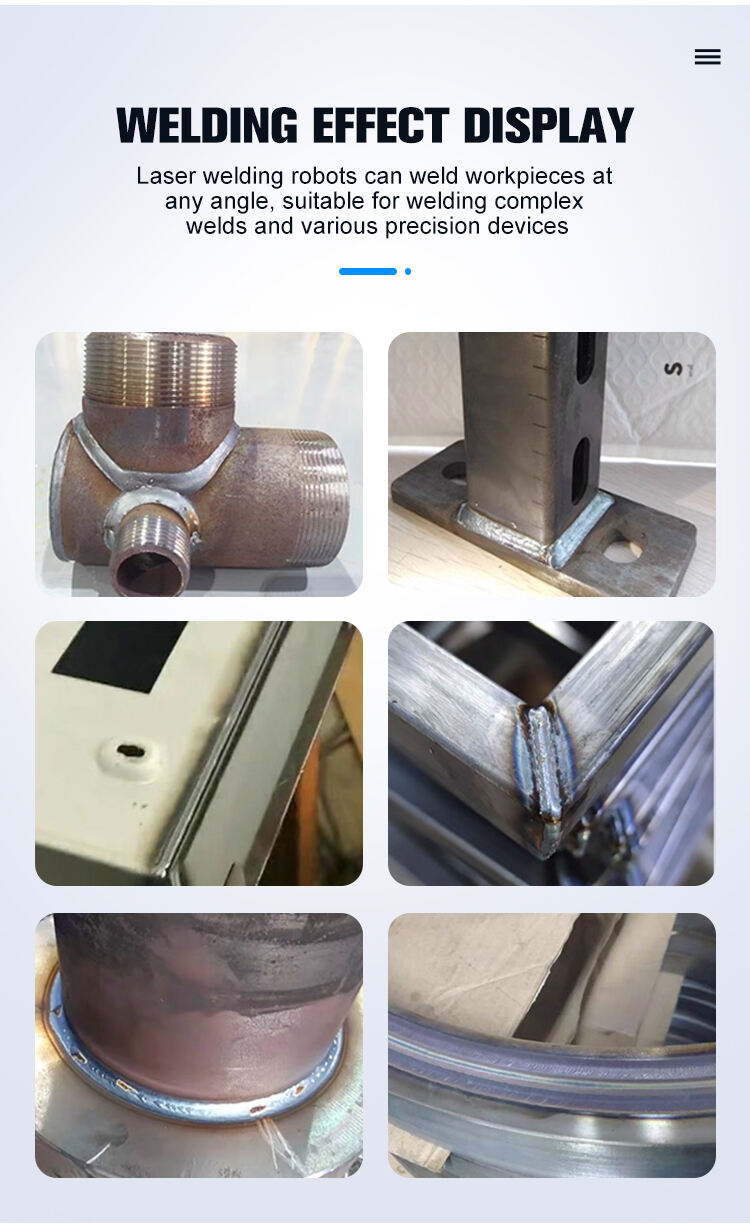
เหมาะสําหรับวัสดุต่าง ๆ
พร้อมกับฐานข้อมูลผู้เชี่ยวชาญในการปั่นที่กว้างขวาง ระบบนี้รองรับการปั่นและการปั่นวงจรสั้นสําหรับวัสดุเช่นเหล็กคาร์บอน, เหล็กไร้ขัดเหล็ก, ใบเหล็กกระปุกและเหล็กสับอลอลูมิเนียม

รายละเอียดมาตรฐาน
| โครงสร้าง | ประเภท multi-joint แบบตั้ง (ระดับอิสระ 6) | |
| น้ําหนักเคลื่อนที่*1 | หัวมือ | 180 กิโลกรัม |
| U arm | 30กก. | |
| สูงสุด | ขนาด 2702 มม. | |
| ความแม่นยําการตั้งตําแหน่งซ้ํา * 2 | 0.05 มิลลิเมตร | |
| น้ําหนักร่างกาย | 1020 กิโลกรัม | |
| เกรดการป้องกัน | ร่าง: ip54 รางข้อมือ: ip67 | |
| การติดตั้ง | แบบติดพื้น | |
สําหรับรายละเอียดเพิ่มเติม

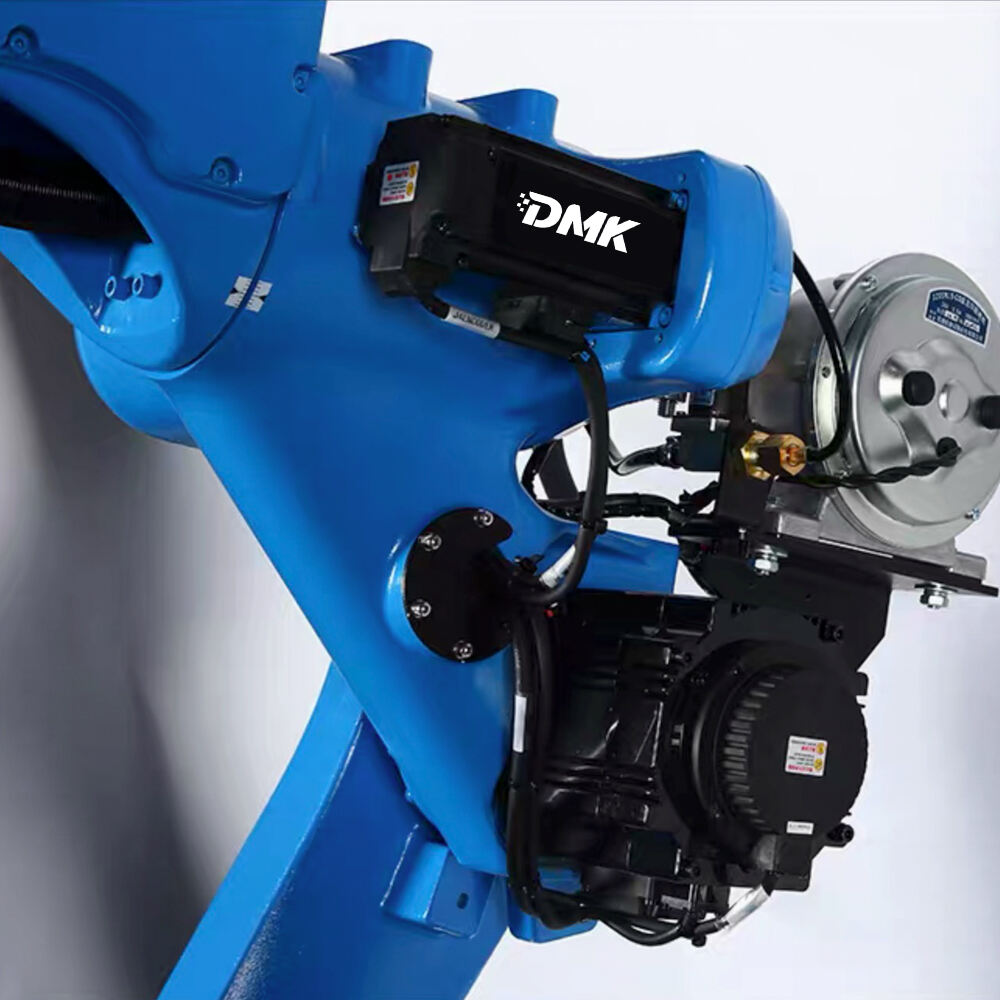
ไฟเทียนการปั่น servo
ไฟไหม้เซอร์โวช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์ช์
การออกแบบระบบทําความเย็นด้วยน้ํา
ระบบเย็นน้ําที่บูรณาการสําหรับคอและมอเตอร์ของไฟฟัน ช่วยเพิ่มประสิทธิภาพการใช้งานและความทนทานได้อย่างมาก
การให้อาหารสายไฟที่แม่นยําและมั่นคง
ระบบการให้อาหารสายไฟที่ได้รับการสนับสนุนจากมอเตอร์มอนต์ ให้การให้อาหารสายไฟที่เข้าไปและกลับกลับได้พร้อมกัน เพื่อให้การให้อาหารสายไฟได้เรียบร้อยและมีพลังงาน
เทคโนโลยีการตรวจจับที่ก้าวหน้า
เทคโนโลยีการตรวจจับที่พัฒนาเป็นตัวเลือกรวมถึงการตรวจจับสัมผัส การตรวจจับสายเลเซอร์ การติดตามวงโค้ง และการติดตามเลเซอร์
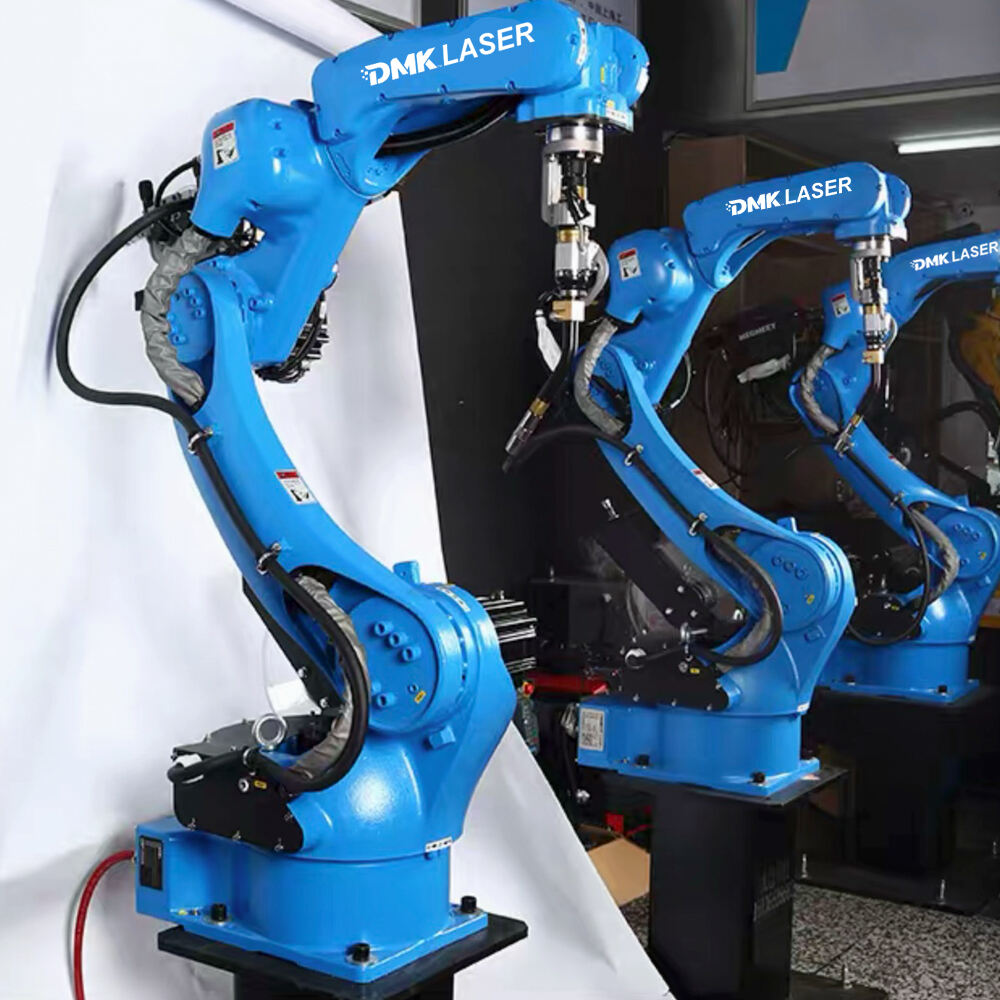
การออกแบบแบบสับสับ 6 แกน
แอร์มถูกออกแบบให้มีความสับสนอย่างน้อยกับอุปกรณ์รอบตัว เพื่อประหยัดพื้นที่ทํางานที่คุ้มค่า
การควบคุมความยาววงจรแบบคง
การควบคุมอินเวอร์เตอร์แบบดิจิตอลเต็ม สามารถปรับความแรงกระแทกวงจรแบบเร็ว เพื่อให้ความมั่นคงตลอดกระบวนการผสม
เครื่องใช้ไฟฟ้า
ใช้กันอย่างแพร่หลายในงานผสมผสานวงโค้ง, การประมวลผลเลเซอร์, การจัดการ, อุตสาหกรรมรถยนต์, อุตสาหกรรมเครื่องจักรและเครื่องจักร
การใช้งาน:การจัดการ การประกอบ/การจําหน่าย สามารถตอบสนองความต้องการของผู้ใช้อย่างหลากหลาย เช่น การจับชิ้นส่วนส่วนส่วนใหญ่ การวางหู, การประกอบ, การตี, การรับ/การบรรจุ, การจัดกระดาษพอลเลติก เป็นต้น
ข้อมูลบริษัท

