 EN
EN
 AR
AR CS
CS NL
NL FR
FR DE
DE IT
IT JA
JA KO
KO PL
PL PT
PT RU
RU ES
ES UK
UK TH
TH TR
TR



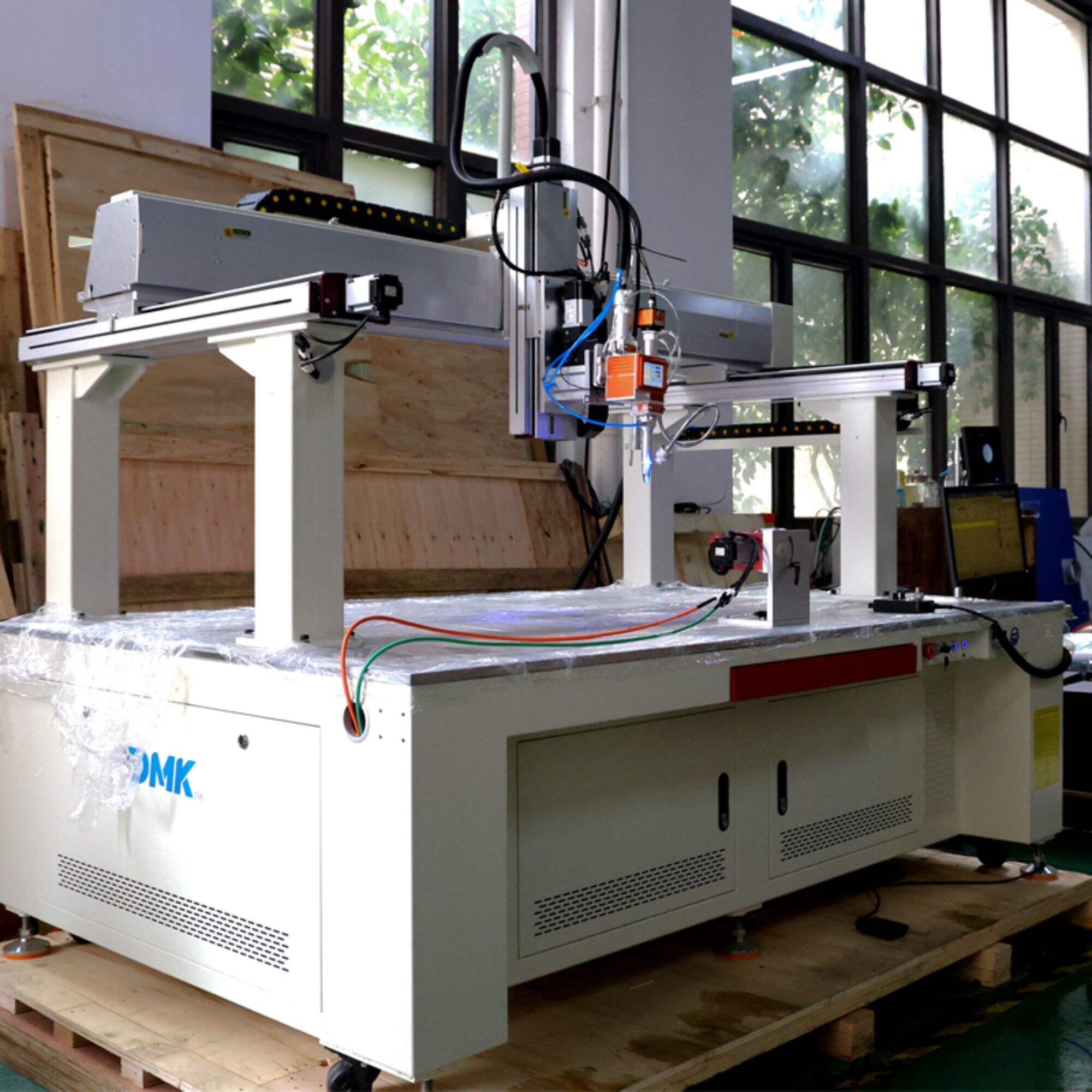


automatisch laserroestverwijderingssysteem
Productomschrijving
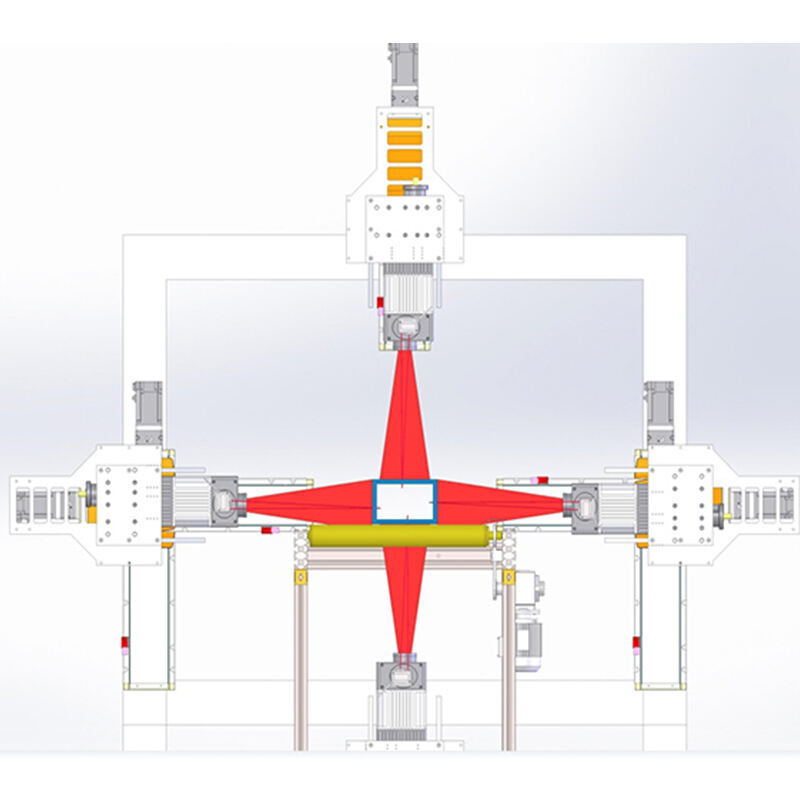
voorwerp van de reiniging: laklaag van het wielpaar en roest- en olievlekken van bewegende wielen en aanhangwagens.
Requirements for cleaning: 1) vernis (80-120μm) en roest en olie van het wielpaar oppervlak verwijderen, het bewegende wielpaar is nodig om de versnellingsbak, koppeling en journal (geel draadraamgebied) te vermijden, het aanhangwagenwielpaar reinigt het totale
invoering van technische oplossingen
de laserreinigingsmachine (werkstation) voor wielparen omvat een laserreinigingscentrale, een mechanische arm, een mechanische armbaan en een drager, een opheffing- en aandrijvingstoestel voor wielparen, een automatische laad- en losinstallatie, een rook- en stofzuiveringssysteem, een bediening
Onder deze systemen kan het personeel op het touchscreen van de besturingseenheid aan de linkerkant van het werkstation voor het reinigen van het wielpaar het startcommando geven; ondertussen kan het personeel via de hulpapparatuur (videobewakingscomponent in het werkstation) het scherm van de reinigingssituatie in het station
het midden van de werkplek is de schoonmaakruimte, een gesloten ruimte bestaande uit de buitenbekleding van de werkplek en de speciale deur van het logistieke kanaal die voor en na de werkplek is geplaatst (de deur wordt gesloten bij automatische schoonmaak).
via de bovenstaande weg kan het laserreinigingswiel op het oppervlak van de verf, roest en olie in het proces van rook- en stofgeur, na de werkplek aan de linkerkant van het rook- en stofreinigingssysteem, via de algemeen gesloten en gelokaliseerde met de precieze stofopvang, recht
Specificaties
de belangrijkste onderdelen van dit werkstation voor laserreiniging zijn weergegeven in de onderstaande tabel.
| Reeksnummer | Naam | Fabriek | Opmerkingen |
| 1 | laserreinigende gastheer | dmk | |
| 2 | robotarm | Yasuokawa | bevat 1 externe robotas |
| 3 | mechanische armbaan en ondersteunend draagbaar portier | dmk | |
| 4 | De aanhanger van de motor is een motor met een vermogen van meer dan 100 W. | dmk | |
| 5 | automatische laad- en losmachine | dmk | |
| 6 | besturingseenheid | dmk | |
| 7 | werkstationdek | dmk | |
| 8 | hulpapparatuur | dmk | onderdelen voor videobewaking |
| 9 | rookreinigingssysteem | Jj | uitrusting voor het afvoeren van rook op werkplekken |
Tabel 3-1 gedetailleerde lijst van projectconfiguraties

automatisch laserroestverwijderingssysteem

automatisch laserroestverwijderingssysteem

automatisch laserroestverwijderingssysteem
Toepassingen
voorbereidingswerkzaamheden vóór de start van het laserreinigingspaar: controleer onder meer of de voorlens van het laserreinigingspistool schoon is, of de noodstopknop van de apparatuur is geopend, of het bedieningssysteem normaal is ingeschakeld, of er een alarm is, enz.
automatische reinigingsprocedure:
1) het personeel duwt het wielpaar naar een bepaalde wachtpositie buiten de schoonmaakruimte en start de apparatuur in de bedieningsruimte.
2) de laad- en losdeur opent, het automatische laad- en losmechanisme beweegt zich onder het wielpaar in de wachtruimte en de klemkanten stijgen om de wielas te klemmen. Het automatische laad- en losmechanisme duwt het wielpaar naar de reinigingspositie. Tegelijker
3) de laaddeur is gesloten om een gesloten werking te garanderen. De heftoestel tilt het wielpaar op en af van het spoor en de hulp-automatische positiesysteem detecteert de heftoestel om de positiegewogenheid te verbeteren.
4)de automatische laad- en losmachine wordt naar beneden gedraaid en de aandrijvingsauto zet het wielpar om. De robot wordt automatisch gepositioneerd en de laser begint automatisch met het reinigen tot alle posities zijn schoongemaakt.
5) de automatische laad- en losmachine wordt naar boven uitgestrekt, de hefmachine naar beneden gestuurd en het wielpaar wordt weer op de rails geplaatst. De uitgang van het onderste materiaal wordt geopend en de automatische laad- en losmachine duwt het wielpaar naar het onderste materiaalgebied.
