 EN
EN
 AR
AR CS
CS NL
NL FR
FR DE
DE IT
IT JA
JA KO
KO PL
PL PT
PT RU
RU ES
ES UK
UK TH
TH TR
TR





자동 레이저 강강 제거 시스템
제품 설명
청소 대상: 바퀴 쌍 표면 래크 코팅 및 움직이는 바퀴와 트레일러의 노폐 및 기름 얼룩.
청소 요구 사항: 1) 바크 코팅 (80-120μm) 과 구동 쌍 표면에서 강강 및 기름을 제거하고, 움직이는 바퀴 쌍은 기어 박스, 결합 및 저널 (노란 철선 프레임 영역) 을 피하기 위해 필요합니다. 트레일러 바퀴 쌍은 전체 표면을 청소합니다. 움직이는 자동차와 트
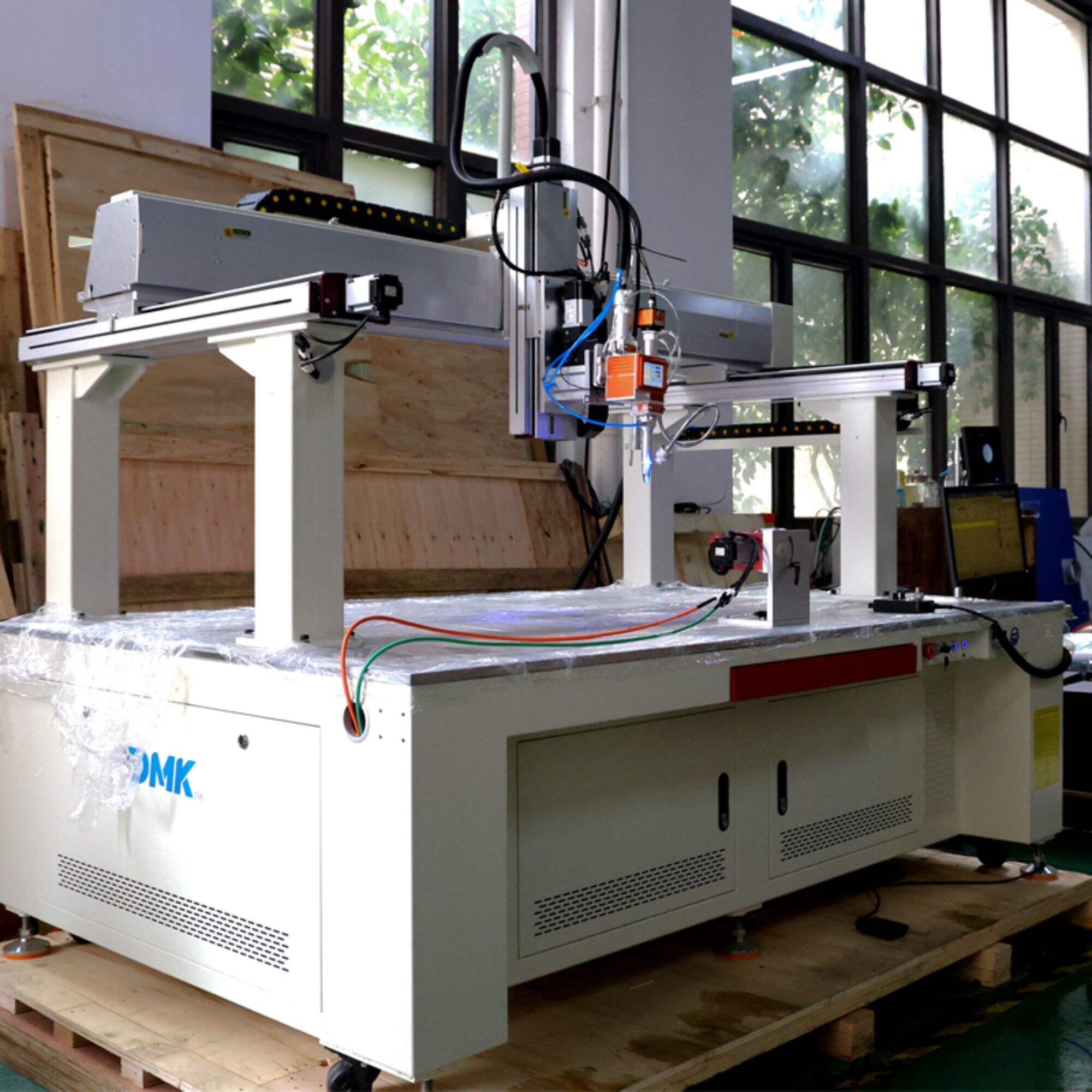
기술 솔루션 도입
바퀴 쌍 레이저 청소 기계 (작업소) 는 레이저 청소 메인프레임, 기계식 팔, 기계식 팔 트랙 및 지원 턴트리, 바퀴 쌍 승강 및 운전 장치, 자동 로딩 및 배하 장치, 연기와 먼지 정화 시스템, 제어 장치, 작업소 외면 덮개, 전압 안정 전원 공급
그 중, 직원은 바퀴 쌍 청소 작업 스테이션의 왼쪽에있는 제어 장치의 터치 화면을 작동하여 시작 명령을 내릴 수 있습니다. 한편, 보조 장비 ( 작업 스테이션의 비디오 모니터링 구성 요소) 를 통해 직원은 모니터링 화면에서 실시간으로 스테이션의 청소 상황 화면을 직접 관찰 할 수 있습니다.
작업장의 중앙은 청소 구역으로, 그것은 작업장의 외부 덮개와 전후에 설치된 물류 통로의 특수 문으로 구성된 폐쇄된 공간입니다 (자동 청소시 문이 닫히게 됩니다).
위의 방법으로, 레이저 청소 바퀴는 연기와 먼지 냄새의 과정에서 페인트 표면에, 연기와 기름, 후 작업장 왼쪽에서 연기와 먼지 정화 시스템, 전체 폐쇄 및 정밀한 먼지 수집과 함께 지역화 된, 직접 배기가스 포트를 통해 외부 작업장까지 배포 할 수 있습니다: 이것은 한편으로는 직원이 흡입하는
제품 사양
이 레이저 청소 작업장의 주요 구성 요소는 아래 표에서 표시됩니다.
| 일련 번호 | 이름 | 공장 | 비고 |
| 1 | 레이저 청소 호스트 | Dmk | |
| 2 | 로봇 팔 | 야스카와 | 1개의 외부 로봇 축을 포함합니다. |
| 3 | 기계식 팔 트랙 및 지원 지원 기판 | Dmk | |
| 4 | 휠 짝 승강장치 및 구동장치 | Dmk | |
| 5 | 자동 로딩 및 딩 장치 | Dmk | |
| 6 | 제어 장치 | Dmk | |
| 7 | 작업장 덮개 | Dmk | |
| 8 | 보조 장비 | Dmk | 비디오 감시 부품 |
| 9 | 연소 청소 시스템 | JYJ | 작업장 연기를 추출하는 장비 |
표 3-1 세부 프로젝트 구성 목록
-

자동 레이저 강강 제거 시스템
-

자동 레이저 강강 제거 시스템
-

자동 레이저 강강 제거 시스템
응용 프로그램
레이저 청소 쌍을 시작하기 전에 준비 작업: 레이저 청소 총의 앞 렌즈의 청결성, 장비의 비상 정지 버튼이 튀어나온지, 제어 시스템이 정상적으로 켜져 있는지, 경보가 있는지 등을 확인한 후 오류가 없다는 것을 확인한 후, 청소를 시작하기 위해 장비를 시작하십시오.
자동 청소 동작 과정:
1) 직원은 청소실 밖에서 특정 대기 위치에 바퀴 쌍을 밀어 넣고 작업 부위의 장비를 작동시킵니다.
2) 로딩 입구 문이 열리고 자동 로딩 및 릴딩 메커니즘은 대기 공간의 휠 쌍 아래로 이동하고 클램핑 턱이 휠 축을 클램프하기 위해 올라갑니다. 자동 로딩 및 릴딩 메커니즘은 휠 쌍을 청소 작업 위치로 밀어냅니다. 동시에 장비의 자동 유형 식별
3) 로딩 입구 문이 닫혀서 폐쇄된 작동을 보장합니다. 승강장치는 바퀴 쌍을 경로 위로 그리고 밖으로 들어 올리고 보조 자동 위치 감지 장치는 위치 정확성을 향상시키기 위해 승강장치를 감지합니다.
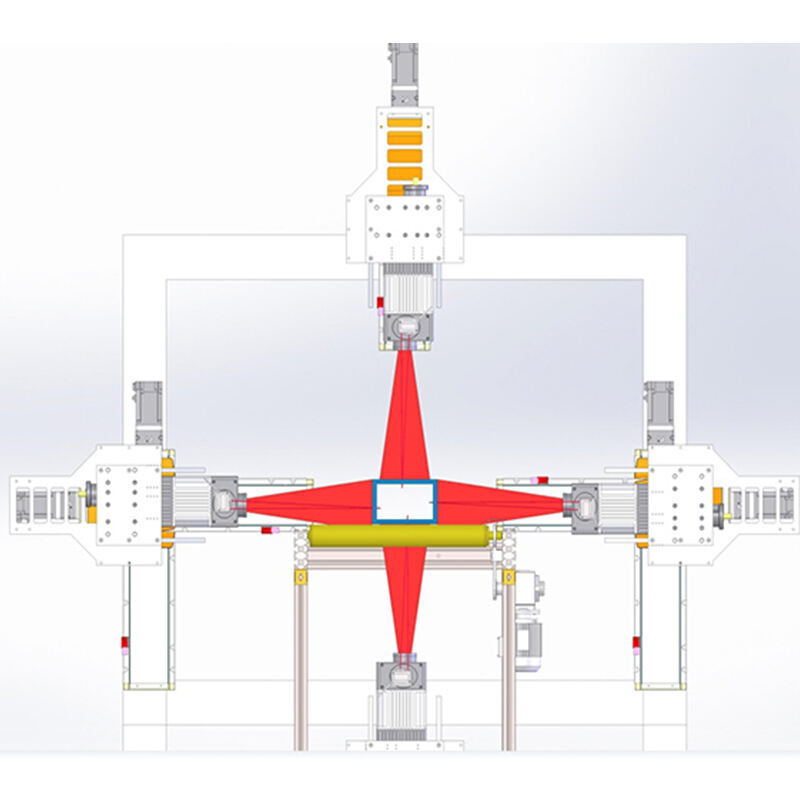
4) 자동 로딩 및 하 장치 턱은 아래로 돌려지고, 드라이브 단위는 바퀴 쌍을 회전하도록 움직입니다. 로봇은 자동으로 위치하고 레이저는 모든 위치가 청소 될 때까지 자동 청소를 시작합니다. 동시에, 연소 정화기가 작동을 시작합니다. 작업 먼지 수집을 보장합니다.
5) 자동 로딩 및 하 장치의 턱은 위로 확장, 리프팅 장치는 아래로 내려, 그리고 바퀴 쌍은 철도에 다시 배치됩니다. 하위 재료의 출구 문이 열리고 자동 로딩 및 하 장치는 바퀴 쌍을 하위 재료 영역으로 밀어 넣습니다. 로딩 및 하 장치는 아래로
