 EN
EN
 AR
AR CS
CS NL
NL FR
FR DE
DE IT
IT JA
JA KO
KO PL
PL PT
PT RU
RU ES
ES UK
UK TH
TH TR
TR





自動レーザー除システム
製品の説明
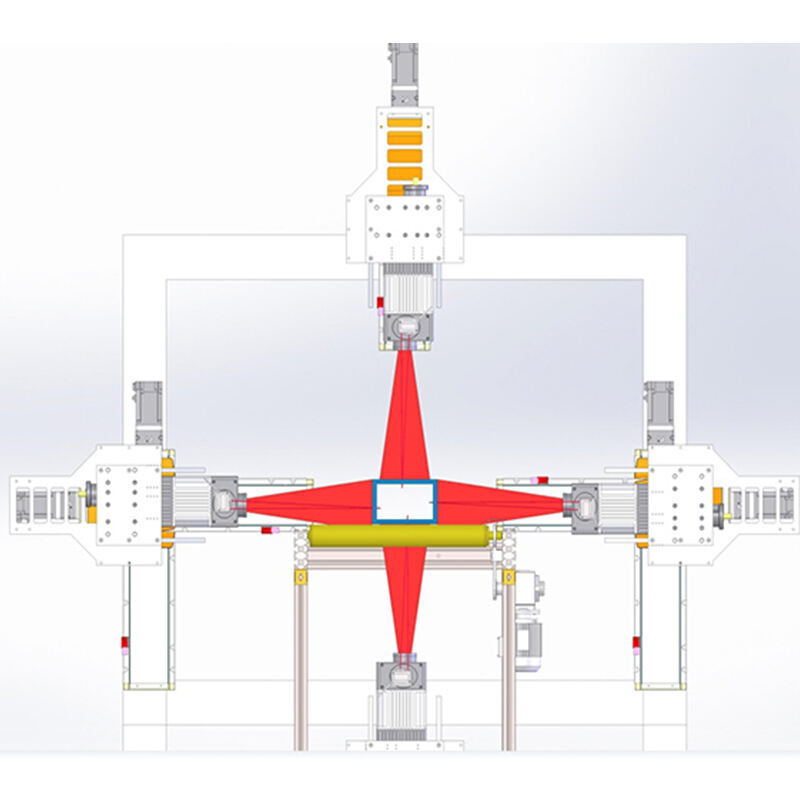
掃除対象: 輪の表面に塗装されたラック,動いている車輪やトレーラーのや油污
清掃要件: 1) 輪の表面から漆 (80-120μm) とと油を除去し,移動する輪の表面はギアボックス,クランプ,日記 (黄色いワイヤフレーム領域) を避けるために必要であり,トレーラーホイールのペアが全体的な表面を清掃する.移動する車とトレー
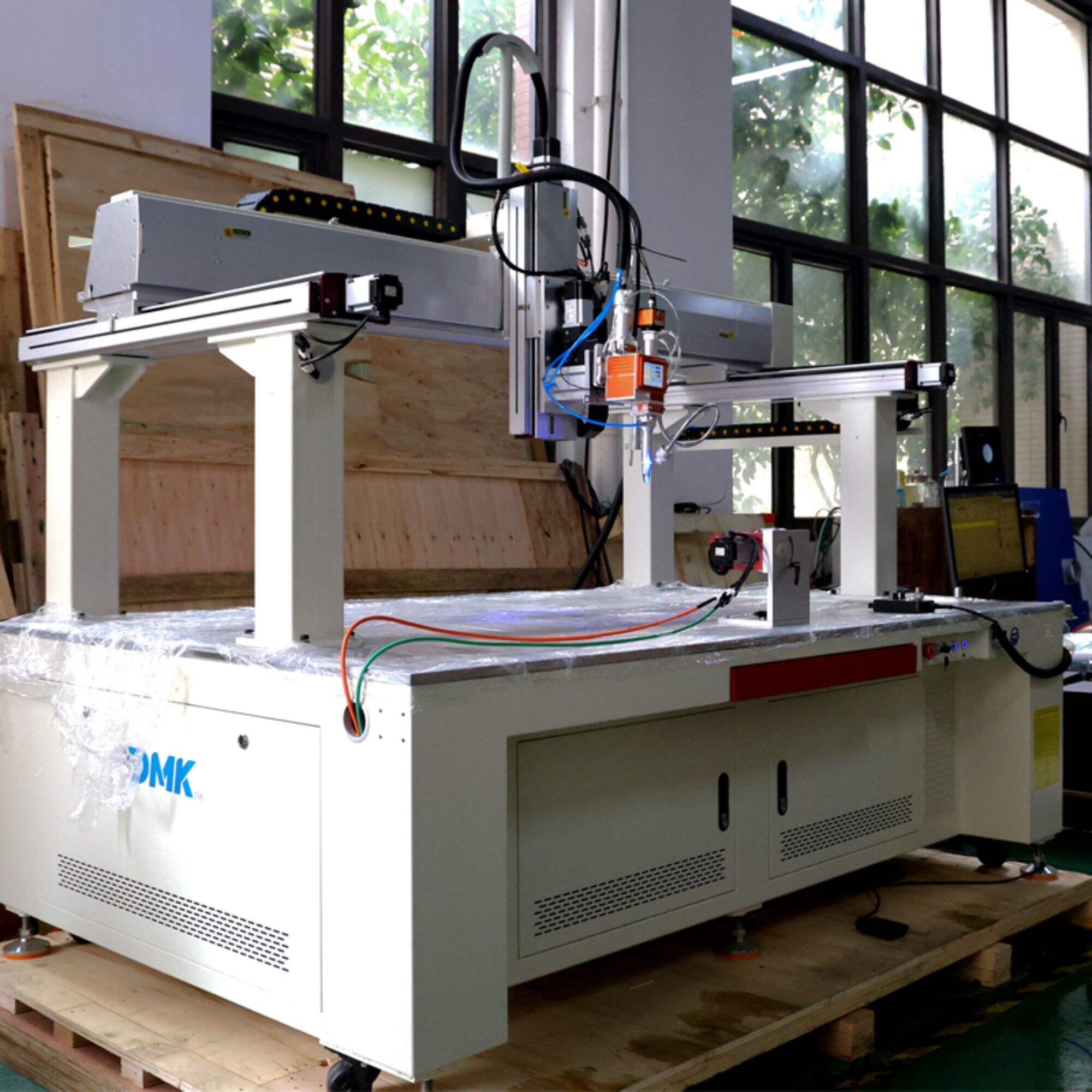
技術的解決法の導入
輪対レーザー清掃機 (作業場) はレーザー清掃メインコンピュータ,機械腕,機械腕の軌跡,サポートゲンター,輪対の持ち上げと駆動装置,自動積載・卸載装置,煙と塵浄化システム,制御装置,作業場外蓋,電圧安定電源,その他の補助機器を含む.
その中でも,スタッフは,車輪ペア清掃作業ステーションの左側にある制御ユニットのタッチスクリーンで操作して起動コマンドを与えることができます. 一方,補助機器 (作業ステーション内のビデオモニタリングコンポーネント) により,スタッフは監視画面で,駅内の清掃状況のスクリーンをリアルタイムで直接観察できます.
作業場の真ん中には,作業場の外蓋と,前後に設置された物流チャネルの特殊ドア (自動掃除ではドアが閉まる) で構成される閉じた空間である清掃エリアがあります.
上記の方法により,レーザー浄化車輪は,油と煙の匂いの処理過程で,塗料の表面に,粉と塵の匂いが,左側の作業場の後,煙と塵の浄化システムの左側,全体的に閉ざされ,精密な塵の収集とローカル化されたシステムを通って,直接排気口を通
仕様
このレーザークリーニングワークステーションの主要構成要素は,下記の表に示されています.
| シリアル番号 | 名前 | 工場 | 備考 |
| 1 | レーザー浄化ホスト | Dmk | |
| 2 | ロボット腕 | 川 | 1 つの外部ロボット軸を含みます |
| 3 | 機械式腕の軌跡と支える支えるゲンター | Dmk | |
| 4 | 輪の両輪を上げ動する装置 | Dmk | |
| 5 | 自動積載・卸載装置 | Dmk | |
| 6 | 制御ユニット | Dmk | |
| 7 | 作業場カバー | Dmk | |
| 8 | 補助機器 | Dmk | ビデオ監視部品 |
| 9 | 煙浄化システム | ねぇ | 作業場の煙抽出装置 |
表 3-1 詳細なプロジェクト構成リスト
-

自動レーザー除システム
-

自動レーザー除システム
-

自動レーザー除システム
アプリケーション
レーザークリーニングペアを起動する前に準備作業:レーザークリーニング銃の前レンズの清潔性,機器の緊急停止ボタンがポップアップしているか,制御システムが正常にオンになっているか,アラームがあるかどうか,など.エラーがないことを確認した後,掃除を開始するために機器を起動する.
自動浄化プロセス
1) スタッフは,掃除室の外の特定の待機位置に車輪を押し,操作エリアで機器を起動します.
2) 荷乗入口ドアが開き,自動荷乗・卸乗メカニズムは待機場内の車輪の下へと移動し,クランプするが車輪軸をクランプするために上昇します.自動荷乗・卸乗メカニズムは車輪を掃除作業の位置に押し込み,同時に,機器の自動型識別装置は車
ローディング・エントリードアが閉ざされ,閉ざされた動作を保証します. 引き上げ装置は車輪を上下に,そして軌道から外へ上げ,補助自動位置位置検出装置は位置位置を正確に向上させるために引き上げ位置を検出します.
4) 自動積載・卸載装置のが下に戻され,駆動装置は輪を回転させる. ロボットは自動的に位置付けされ,レーザーはすべての位置が清掃されるまで自動掃除を開始する.同時に,煙浄化器は作業の塵の収集を確保するために動作を開始する.
5) 自動積載・卸載装置のが上へと伸び,リフティング装置が下へと下がり,車輪のペアがレールに戻される.下部材料の出口ドアが開き,自動積載・卸載装置が車輪のペアを下部材料領域に押し込む. 自動積載・卸載メ
