 EN
EN
 AR
AR CS
CS NL
NL FR
FR DE
DE IT
IT JA
JA KO
KO PL
PL PT
PT RU
RU ES
ES UK
UK TH
TH TR
TR






Mit einem Druck von mehr als 20 W
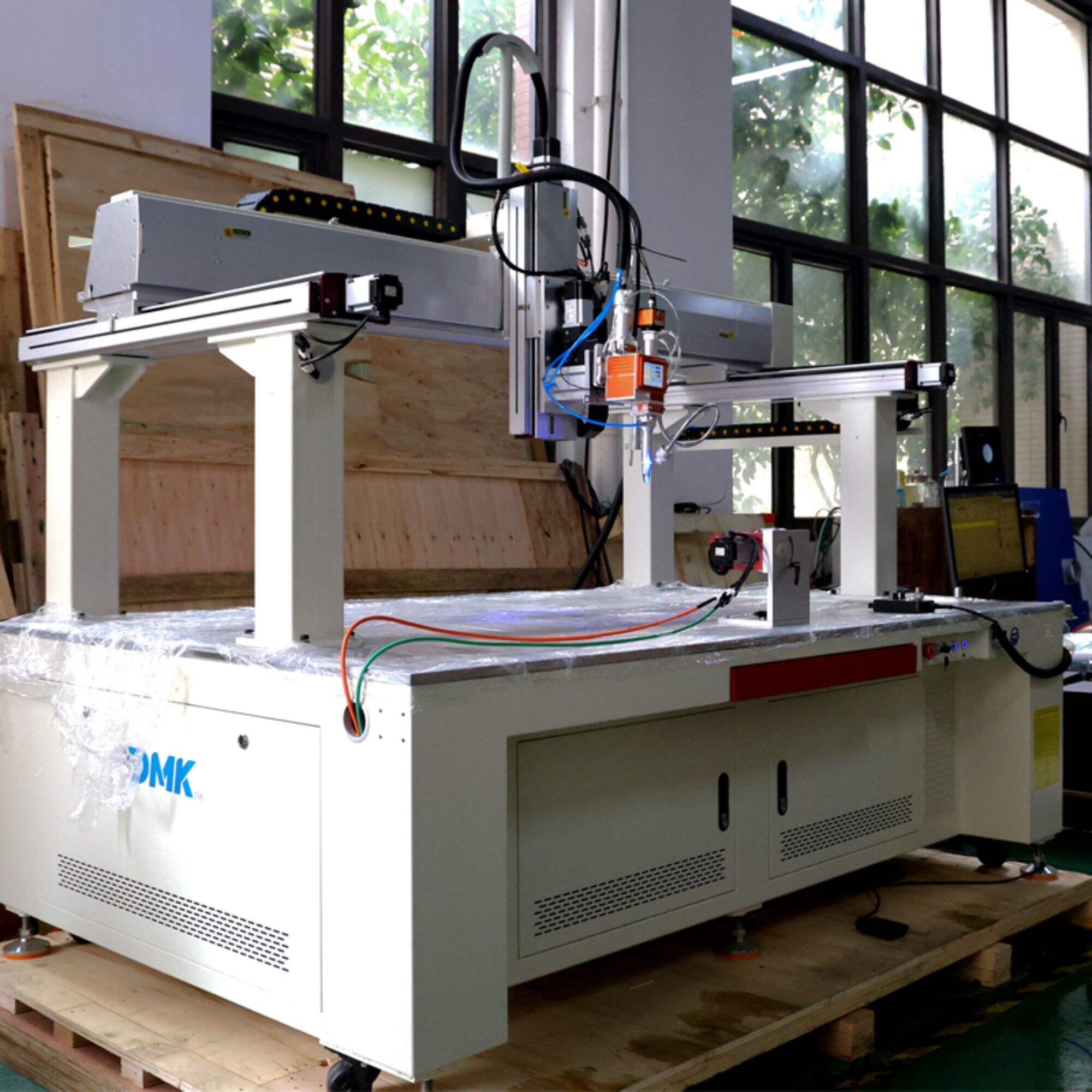
Produktbeschreibung
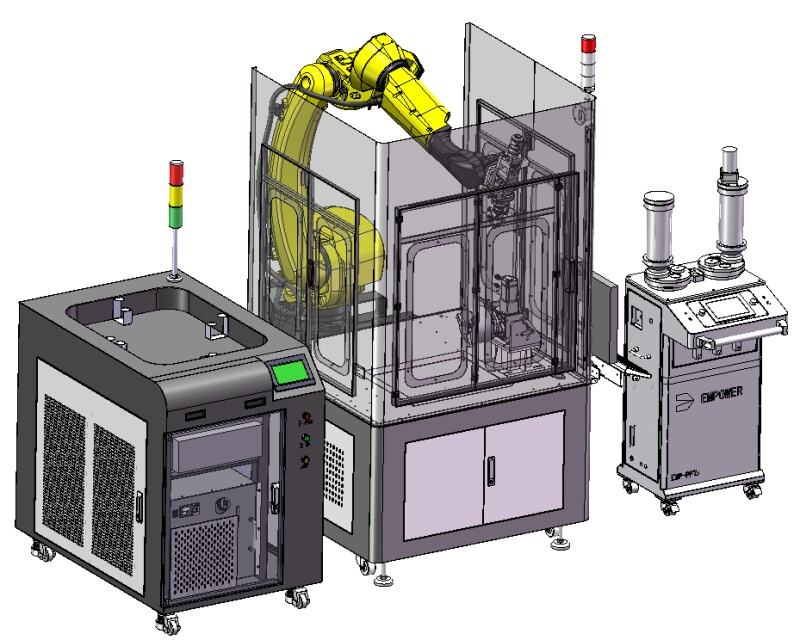
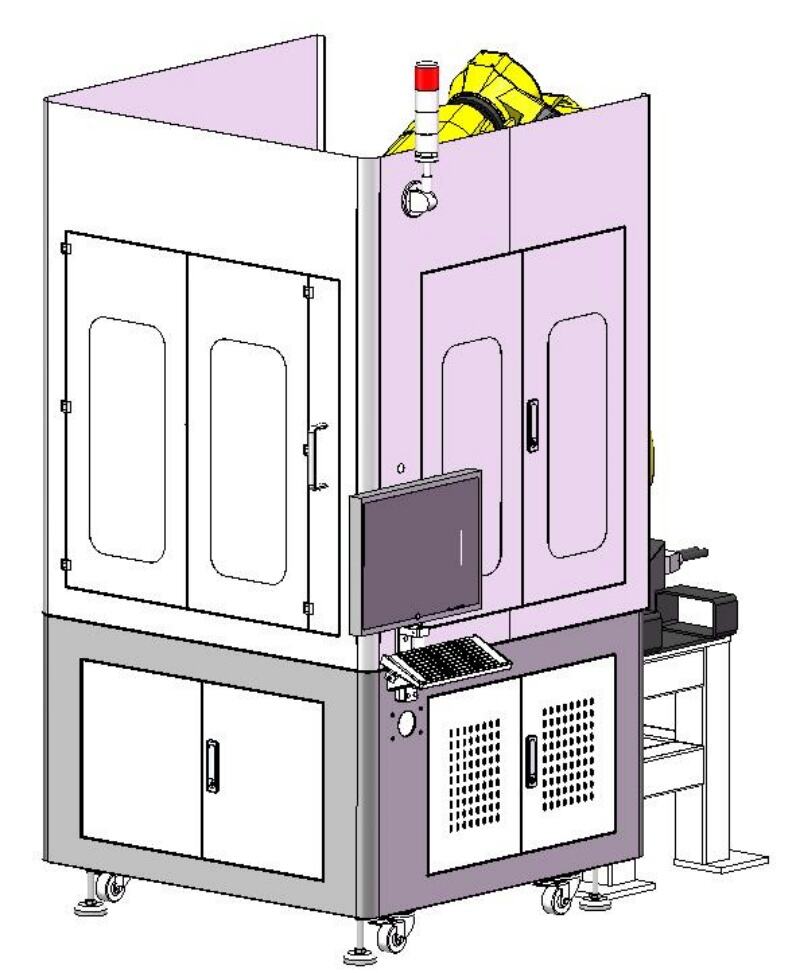
Das gesamte Verarbeitungssystem umfasst einen doppelbarrel-Pulver-Fütterer, Werkbühnenkomponenten, Industrie-Roboter, Laserköpfe, Chiller, Laser usw. Der Laserkopfbewegungsantrieb nimmt industrielle Roboter an und das Halterteil der Ausrüstung nimmt eine halboffene Form an
TECHNISCHE DATEN
| Seriennummer | Name | Hersteller | Spezifikationsmodell | Hauptparameter | MENGE |
| 1 | Faserlaser | Max | MFSC-3000x | 1. Faserlaser mit Ausgangsleistung von 3000 W; | 1 |
| 2. Leistungsbereich: 10 bis 100%; | |||||
| 3. Wellenlänge 1080 (± 10 nm); | |||||
| ▲4. Faserkerndurchmesser 600μm, Länge 20m, Schnittstellenzeit; | |||||
| 5. Kurzzeitenergieverbrauchstabilität (100% kontinuierlich > 1 h): ±2% (maximal); | |||||
| 6、Langzeit-Leistungsstabilität (100% kontinuierlich > 24 h): ±5% (maximal); | |||||
| 7. Eingangsspannung: 380 V; | |||||
| 8. Höchststromverbrauch: 10 kW; | |||||
| 9, Mindestbogenradius eines Glasfaserkabel: 200 mm; | |||||
| 2 | Laserkopf | Raytools | Bc104 | 1、Optische Schnittstelle: loe; | 1 |
| 2. Widerstandsleistung: 4 kW; | |||||
| 3、Kollimation 100 mm, Schärfe 250 mm; | |||||
| 4. Projektionswellenlänge: 1080 nm; | |||||
| 5、Kollimationsfokusbereich: 0-20 mm; | |||||
| 6、Konfiguration der Koaxialpulverzuführungsdüse, Pulverkonvergenzgröße: ≤ 2,5 mm. | |||||
| 3 | Kontrollsystem | Dmk | V1.0, Chinesisch - ohne oberen Computer, xw100 | 1、Steuerungssystem mit unabhängigen Rechten an geistigem Eigentum, unterstützt Ethercat Bus/Impuls Servo Steuerung; | 1 |
| 2、Drei-Achsen-Lehre (xyz linear), xy-Ebene-Lehre; Unterstützung der Grafikverarbeitung; Pso-Prozessausrichtung, Steuerung der Leistungskurve; | |||||
| ▲3. Unterstützung von 3+n Achsenbewegungen, starke Erweiterbarkeit, kann mindestens 90 nc Achsenbewegungen/unendliche Erweiterung hinzufügen; | |||||
| 4. die integrierte Steuerung des Lasers, des Kühlers, des Bewegungsmechanismus und der Gaskreiseinheit; | |||||
| ▲5. Die Bedienoberfläche wird von den Kunden individuell angepasst; | |||||
| ▲6. Das Programm kann importiert werden, um 3D-Druckarbeiten zu realisieren. | |||||
| 4 | Wasserkühler | - Das ist Hanli. | Rmfl-3000ant | ▲1、Stromversorgungsspannung 220v,Nennleistung 2,71kw; | 1 |
| 2, Kühlmittel: R-410a. | |||||
| 3. Temperaturregelungsgenauigkeit: ± 0,5°c; | |||||
| 4, Pumpenleistung: 0,4 kW; | |||||
| 5. Wasserbehälter: 16 l; | |||||
| 6, maximaler Pumpenkopf: 40 m; | |||||
| 7,Nenndurchfluss: 2 l/min +> 18 l/min. | |||||
| 8、Nettogewicht 59 kg,Brutogewicht 71 kg; | |||||
| 9. Größe (Länge, Breite und Höhe): 88*48*43cm; | |||||
| 10, beinhaltet eine benutzerdefinierte Kühlerplatten-Schrank. | |||||
| 5 | Zweizylinder-Pulverzufuhr | Dmk | Emp-pf-2-1 | 1. Eingang: 220 VAC, 50 Hz; | |
| 2、 Leistung:≤1kw; | |||||
| 3、 kann Pulvergröße senden: 20-200μ; | |||||
| 4、Geschwindigkeit der Pulverzufuhrscheibe: 0-20rpm Stufenlose Drehzahlregelung; | |||||
| 5、Wiederholungsgenauigkeit der Pulverzufuhr: < ± 2%; | |||||
| 6, die erforderliche Gasquelle: Stickstoff/Argongas; | |||||
| 7、Bedienmodus: plcindependent steuerbar | |||||
| 8, Umrissgröße: 630 mm*500 mm*1550 mm ((Länge, Breite und Höhe) | |||||
| 6 | Industrieroboter | - Das ist nicht wahr. | M-20id | 1,Last: 25,0 kg; | 1 |
| 2. Anzahl der steuerbaren Achsen; | |||||
| 3. erreichbarer Radius: 1831 mm; | |||||
| 4、Genauigkeit der Wiederholung der Positionierung: ±0,02 mm; | |||||
| 5, Robotergewicht: 250 kg. | |||||
| 7 | Werkstuhlkomponenten | Dmk | Anpassbar | Umfasst Arbeitsschrank, Robotermontagebasis, Kühlerblechschrank, rotierende Plattform usw. | |
| Zubehör für Generatoren | Dmk | Anpassbar | Enthält 10 Schutzlinsen, 3 Schutzbrillen, Gas-, Wasser- und Stromkreise usw. |
-

Mit einem Druck von mehr als 20 W
-
Mit einem Druck von mehr als 20 W
-

Mit einem Druck von mehr als 20 W
Ein kurzes Detail
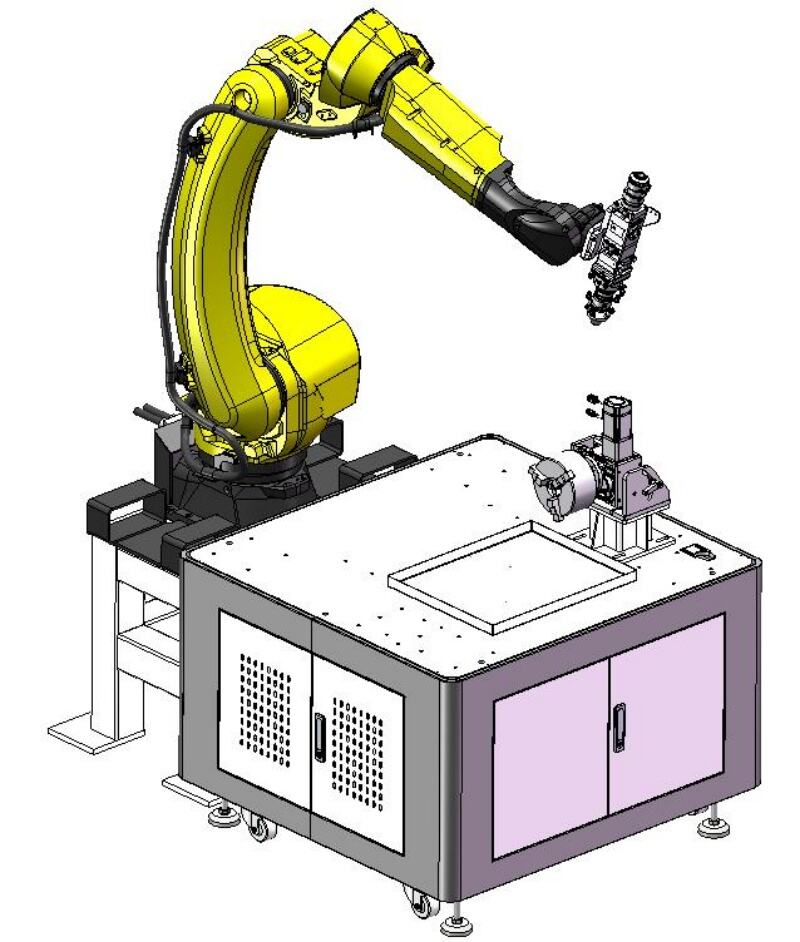
Zum Beispiel besteht das Bewegungssystem der Ausrüstung aus zwei Teilen, nämlich dem Bewegungsmechanismus des Roboters und dem Mechanismus der rotierenden Plattform. Das Werkstück wird an der rotierenden Plattform geklemmt und der Laserkopf ist auf dem Industrieroboter montiert, der den Laser real
Die Arbeitsplattform besteht aus geschweißtem Quadrat und mit Blech-Metall umwickeltem Rand, der stark und fest mit schönem Aussehen ist. Der obere Teil des Schranks verfügt über Beobachtungsfenster auf drei Seiten für eine einfache Beobachtung der internen Verarbeitung. Die Arbeitsbank ist mit einem Dis
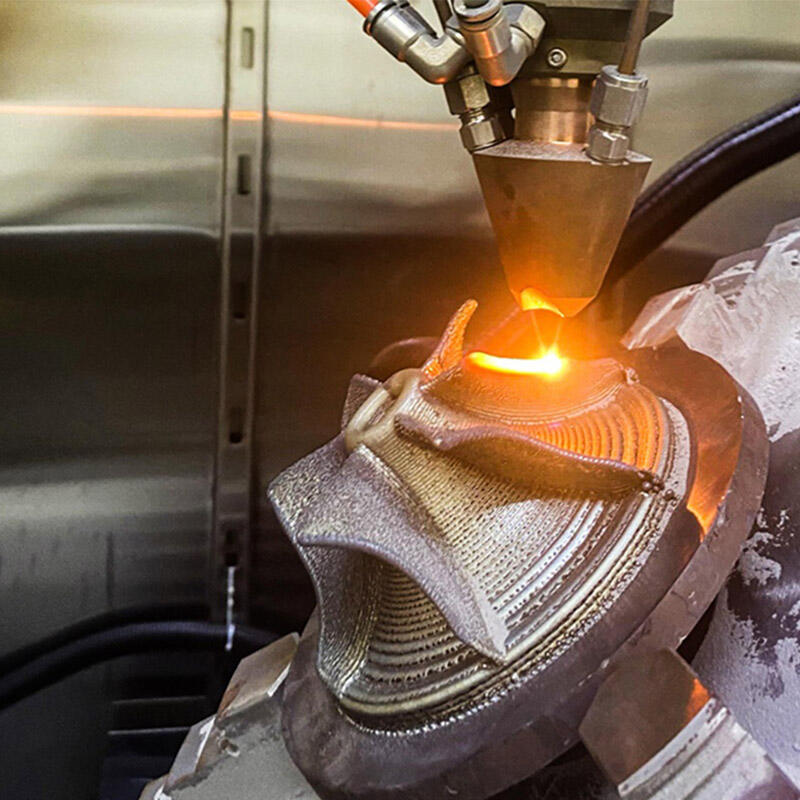
ANWENDUNGEN
Die automatische Laserverkleidung für industrielle Roboter wird hauptsächlich für Oberflächenbeschichtung und Reparatur verwendet und kann in folgenden Bereichen weit verbreitet werden:
Automobilherstellung: Im Automobilherstellungsprozess können Laser-Verkleidungsgeräte verwendet werden, um die abgenutzten oder beschädigten Oberflächen von hochwertigen Komponenten wie Motorteilen, Stoßdämpfern und Turbinenblättern zu reparieren und die Lebensdauer und Leistung von Teilen
Luftfahrt: Die Luftfahrt stellt äußerst hohe Anforderungen an die Leistung und Qualität der Materialien. Laserverkleidungsgeräte können zur Reparatur von Flugzeugmotorenblättern, Turbinenscheiben, Luftfahrtkonstruktionsteilen usw. verwendet werden, um deren Verschleißfestigkeit und Korrosionsbest
Eisenbahnverkehr: Im Eisenbahnverkehr können Laserverkleidungsgeräte zur Reparatur und Stärkung der Schienenoberfläche und der wichtigsten Komponenten von Eisenbahnfahrzeugen eingesetzt werden, um deren Lebensdauer und Sicherheit zu verbessern.
Energiewirtschaft: In der Energiewirtschaft können Laser-Bekleidungsgeräte zur Reparatur und Stärkung von Blades, Turbinen, Lager und anderen Komponenten von Stromerzeugungsanlagen verwendet werden, um deren Arbeitseffizienz und Zuverlässigkeit zu verbessern.
Petrochemie: Laserverkleidungsgeräte können zur Reparatur und zum Schutz von Ventilen, Rohren, Pumpenhülsen usw. von petrochemischen Geräten verwendet werden, wodurch eine höhere Verschleiß- und Korrosionsbeständigkeit in rauen Arbeitsumgebungen gewährleistet wird.
Metallverarbeitung: Laserverkleidungsgeräte können zur Reparatur und Stärkung der Oberfläche von Metallformen, Werkzeugen und Teilen verwendet werden, um deren Lebensdauer und Genauigkeit zu verbessern.
Wettbewerbsvorteil
Industrielle robot-automatische Laserverkleidungsanlagen haben folgende Vorteile:
Hohe Präzision und Steuerbarkeit: Laser-Bekleidungsanlagen können sehr präzise Verkleidungsvorgänge erreichen. Durch die Steuerung von Parametern wie Laserleistung, Scangeschwindigkeit und -bahn können die Dicke und Form der Verkleidungsschicht präzise gesteuert werden, um eine hochwertige
Effizienz: Laserbeschichtungsausrüstung hat eine hohe Verarbeitungsgeschwindigkeit, kann Oberflächenreparatur- und Beschichtungsaufgaben schnell abschließen und die Produktionseffizienz verbessern. Gleichzeitig kann das automatisierte Robotersystem kontinuierlich laufen, wodurch die Ausfallze
Flexibilität: Industrieroboter können nach verschiedenen Werkstückformen und -anforderungen programmiert und angepasst werden, um sich an unterschiedliche Werkstück- und Prozessanforderungen anzupassen. Durch Änderung der Laserfokusposition und des Scanning-Pfades können Verkleidungsvorgänge an verschiedenen Oberflächenformen durchgeführt werden.
Feinkontrolle: Laserverkleidungsgeräte können lokale Verkleidungen realisieren, nur in dem Bereich arbeiten, der repariert oder beschichtet werden muss, vermeiden, dass das gesamte Werkstück erhitzt wird, den hitzebelasteten Bereich reduzieren und das Verformungsrisiko verringern.
Materialanpassungsfähigkeit: Laserverkleidung kann auf eine Vielzahl von Materialien angewendet werden, einschließlich Metalle, Keramik usw. und kann eine hohe Bindfestigkeit und eine gute Schnittstellenqualität zwischen verschiedenen Materialien erreichen.
Umweltschutz und Energieeinsparung: Bei der Laserbeschichtung werden keine zusätzlichen Chemikalien oder Lösungsmittel verwendet, wodurch die Umweltverschmutzung verringert wird. Gleichzeitig kann die Laserenergie präzise gesteuert und positioniert werden, um Energieverschwendung zu vermeiden und Energie zu sparen.
